Pari voimaa ja sen vaikutus kehoon. Voimapari ja sen ominaisuudet Parin voiman momentin määritys
Voimaparia mekaniikassa pidetään yhtenä peruskäsitteistä yhdessä voiman käsitteen kanssa.
Pari voimaa – järjestelmä, jossa on kaksi rinnakkaista, vastakkain suunnattua ja suuruudeltaan yhtä suurta voimaa, jotka eivät ole samalla suoralla.
Parin voiman toimintataso – taso, jolla voimien vaikutuslinjat sijaitsevat.
Vipuvoiman pari – lyhin etäisyys (pystysuora pituus) voimaparin muodostavien voimien vaikutuslinjojen välillä.
Kuvassa Kuvassa 1.34 on esitetty voimien pari, jonka toimintataso on OXY-vertailujärjestelmän OXY-tasossa.
Voimat F 1 , F 2 muodostavat pari voimaa. F1 = F2; F 1 = – F 2. Parin voimat eivät kuitenkaan ole tasapainossa, koska ne eivät ole suunnattu yhteen suoraviivaan. Voimaparilla on taipumus saada aikaan sen kappaleen pyöriminen, johon se kohdistuu. Voimaparin toiminnalle kehoon on ominaista sen momentti.
Käsite otetaan käyttöön, jotta voidaan kvantitatiivisesti karakterisoida voimaparin vaikutusta kehoon ja osoittaa, mihin suuntaan voimaparilla on taipumus pyörittää kehoa. voimaparin algebrallinen momentti .
Parin voiman algebrallinen momentti – arvo, joka on yhtä suuri kuin yhden voiman moduulin ja sen olakkeen tulo, otettuna asianmukaisella merkillä.
M = ± F 1 h = ± F 2 h.
Voimaparin algebrallista momenttia pidetään positiivisena, jos voimaparilla on taipumus pyörittää kappaletta vastapäivään, ja negatiiviseksi, jos se on myötäpäivään. SI-järjestelmässä muutaman voiman momentti mitataan Nm:nä.
Kuvassa 1.35 näyttää parin voimia ( F 1 , F 2), jonka toimintalinjat ovat OXY-tasossa.
Parin voiman hetki – voimaparin mekaanisen vaikutuksen vektorimitta, joka on yhtä suuri kuin parin yhden voiman momentti suhteessa toisen voiman kohdistamispisteeseen.
Parin voiman momentti esitetään vektorilla M. hetken vektori M voimien paria ( F 1 , F 2) on suunnattu kohtisuoraan voimaparin toimintatasoon nähden suuntaan, josta voimapari on näkyvissä, pyrkien pyörittämään toimintatasoaan vastakkaiseen suuntaan myötäpäivään. Määritelmän mukaan (katso kuva 1.35), M^ j, M^ i, M = F 1 x h = F 2 h. Siten voimaparille on täysin ominaista sen momentti M.
Lause. Samassa tasossa olevat voimaparit ovat ekvivalentteja, jos niiden algebralliset momentit ovat numeerisesti yhtä suuret ja niillä on sama merkki.
Tämän lauseen todistus on yksinkertainen, eikä sitä ole annettu tässä.
Lauseen seuraukset:
1. Voimaparia, muuttamatta sen vaikutusta kehoon, voidaan kiertää ja siirtää mihin tahansa kohtaan sen toimintatasossa.
2. Voimaparille voit muuttaa voiman vipuvaikutusta ja moduulia säilyttäen samalla parin algebrallisen momentin ja toimintatason.

Lauseen olemus ja sen seuraukset on esitetty kuvassa. 1.36, joka näyttää voimien pareja vastaavilla algebrallisilla ja vektorimomenteilla. Voimaparien toimintatasot ovat yhtäpitäviä YOZ-tason kanssa.
Lause. Avaruudessa olevat voimaparit ovat ekvivalentteja, jos niiden momentit ovat geometrisesti yhtä suuret.
Tämän lauseen todistus on myös melko yksinkertainen, eikä sitä ole annettu tässä.
Voimapareja koskevista lauseista seuraa johtopäätös: muuttamatta voimaparin vaikutusta kehoon, voipari voidaan siirtää mihin tahansa tasoon, joka on yhdensuuntainen sen toimintatason kanssa, ja myös muuttaa sen voimaa ja vipuvaikutusta pitämällä sen momentin moduuli ja suunta muuttumattomina .
Siten voimaparin momenttivektori voidaan siirtää mihin tahansa pisteeseen, eli voimaparin momentti on ilmainen vektori .
Voimaparin momenttivektori määrittää kolme elementtiä: parin toimintatason sijainnin; pyörimissuunta; hetken numeerinen arvo (moduuli).
Huomioikaa analogia: jos voimavektorin sovelluspiste voidaan sijoittaa mihin tahansa tämän voiman toimintaviivalle ( liukuva vektori ), silloin voimaparin vektorimomentti voidaan soveltaa mihin tahansa kehon kohtaan ( ilmainen vektori ).
Voiman hetki. Pari voimaa.
1. Statiikan peruskäsitteet ja määritelmät.
Aineelliset esineet staatiikassa:
aineellinen kohta,
materiaalipistejärjestelmä,
täysin kiinteä runko.
Materiaalipisteiden järjestelmä tai mekaaninen järjestelmä, on kokoelma aineellisia pisteitä, joissa kunkin pisteen sijainti ja liike riippuu tämän järjestelmän muiden pisteiden sijainnista ja liikkeestä.
Ehdottomasti jäykkä runko on kappale, jonka kahden pisteen välinen etäisyys ei muutu.
Kiinteä ruumis voi olla levossa tai tietyntyyppisessä liikkeessä. Kutsumme jokaista näistä osavaltioista kehon kinemaattinen tila.
|
Pakottaa- kappaleiden mekaanisen vuorovaikutuksen mitta, joka määrittää tämän vuorovaikutuksen voimakkuuden ja suunnan. Pakottaa voidaan soveltaa johonkin pisteeseen, silloin tämä voima on keskitetty. Pakottaa voi vaikuttaa kaikkiin tietyn tilavuuden tai kehon pinnan pisteisiin, silloin tämä voima on hajautettu. |
|
|
Voimajärjestelmä - kanssa tiettyyn kehoon vaikuttavien voimien kokonaisuus. |
|
|
Tuloksena kutsutaan voimaksi, joka vastaa tiettyä voimajärjestelmää. |
|
|
Tasapainottava voima kutsutaan voimaksi, joka on yhtä suuri kuin resultantti ja joka on suunnattu sen toimintalinjaa pitkin vastakkaiseen suuntaan. |
|
|
Toisiaan tasapainottavien voimien järjestelmä on voimien järjestelmä, joka levossa olevaan kiinteään kappaleeseen ei poista sitä tästä tilasta. |
Sisäiset voimat- Nämä ovat voimia, jotka vaikuttavat tietyn järjestelmän pisteiden tai kappaleiden välillä.
Ulkoiset voimat- Nämä ovat voimia, jotka vaikuttavat pisteistä tai kappaleista, jotka eivät ole osa tiettyä järjestelmää.
Statiikan tehtävät:
- kiinteään kehoon vaikuttavien voimajärjestelmien muuntaminen niitä vastaaviksi järjestelmiksi;
- kappaleiden tasapainoolosuhteiden tutkiminen niihin kohdistuvien voimien vaikutuksesta.
1. Statiikan aksioomat.
|
|
3. Tasapainottavien voimien lisäyksen ja poissulkemisen aksiooma. Voimajärjestelmän vaikutus kiinteään kappaleeseen ei muutu, jos siihen lisätään tai jätetään pois toisiaan tasapainottavien voimien järjestelmä. Seuraus. Muuttamatta absoluuttisen jäykän kappaleen kinemaattista tilaa, voima voidaan siirtää sen toimintalinjaa pitkin pitäen sen moduulin ja suunnan muuttumattomina. KANSSA lietettä - liukuva vektori. |
|
|
|
4. Voimien suuntaviivan aksiooma. Kahden leikkaavan voiman resultantti kohdistetaan niiden leikkauspisteeseen, ja se esitetään näille voimille rakennetun suunnikkaan diagonaalina. |
|


5. Toiminnan ja reaktion yhtäläisyyden aksiooma. Jokaisella teolla on yhtäläinen ja päinvastainen reaktio.
2. Yhteydet ja niiden reaktiot
Jäykkää kappaletta kutsutaan vapaaksi, jos se voi liikkua avaruudessa mihin tahansa suuntaan.
Keho, joka rajoittaa tietyn jäykän kappaleen liikkumisvapautta, on yhteys siihen.
Jäykkää kappaletta, jonka liikkumisvapautta rajoittavat sidokset, kutsutaan ei-vapaaksi.
Kaikki ei-vapaaseen jäykkään kappaleeseen vaikuttavat voimat voidaan jakaa:
- asettaa (aktiivinen)
- sidosreaktiot
Aseta voima ilmaisee muiden kappaleiden toiminnan tiettyyn kappaleeseen, joka voi aiheuttaa muutoksen sen kinemaattisessa tilassa.
Viestintäreaktio - tämä on voima, jolla tietty yhteys vaikuttaa vartaloon ja estää sen liikkeet.
Kiinteiden aineiden vapautumisen periaate sidoksista - ei-vapaata kiinteää kappaletta voidaan pitää vapaana kappaleena, johon määrättyjen voimien lisäksi vaikuttavat sidosreaktiot.
|
|
|
|
|
|



Kuinka määrittää reaktion suunta?
Jos tasossa on kaksi keskenään kohtisuoraa suuntaa, joista toisessa yhteys estää kappaleen liikkeen ja toisessa ei, niin sen reaktion suunta on vastakkainen ensimmäiseen suuntaan.
Yleisesti liitoksen reaktio on suunnattu vastakkaiseen suuntaan kuin se, jossa yhteys ei anna kehon liikkua.

 |
|
|
|
Kiinteä sarana mobiili |

|
|

3. Voiman hetki keskellä
Hetki voimaa F suhteessa johonkin kiinteään keskipisteeseen O on vektori, joka sijaitsee kohtisuorassa voimavektorin läpi kulkevaan tasoon nähden ja keskipiste O on suunnattu siihen suuntaan niin, että sen päästä katsottuna voi nähdä voiman pyörimisen F suhteessa keskipisteeseen O vastapäivään.
Voimamomentin ominaisuudet suhteessa keskustaan:
|
|
1) Voiman momentin moduuli suhteessa keskustaan voidaan ilmaista kaksinkertaisella kolmion pinta-alalla OAV
2) Voiman momentti suhteessa keskustaan yhtä suuri kuin nolla siinä tapauksessa, että voiman vaikutuslinja kulkee tämän pisteen kautta, eli h = 0 . |
|
|
3) Jos pisteestä NOIN voiman soveltamispisteeseen asti A piirrä sädevektori, niin voimamomentin vektori voidaan ilmaista vektoritulona
|
|
|
4) Kun voimaa siirretään sen toimintalinjaa pitkin, sen momentin vektori tiettyyn pisteeseen nähden ei muutu. |



Jos jäykkään kappaleeseen kohdistetaan useita samassa tasossa olevia voimia, voit laskea näiden voimien momenttien algebrallisen summan suhteessa mihin tahansa tämän tason pisteeseen
Hetki M O , joka on yhtä suuri kuin tietyn järjestelmän momenttien algebrallinen summa suhteessa mihin tahansa saman tason pisteeseen, kutsutaan voimajärjestelmän päähetki tähän pisteeseen nähden.
3. Voiman momentti akselin ympäri
Voit määrittää voimamomentin akselin ympärillä:
1) piirrä taso, joka on kohtisuorassa Z-akselia vastaan;
2) määrittää pisteen NOIN akselin leikkaus tason kanssa;
3) projisoi voima ortogonaalisesti F tälle tasolle;
4) selvitä voiman projektion momentti F suhteessa akselin ja tason leikkauspisteeseen O.
Allekirjoitussääntö:
![]()
Voiman momenttia suhteessa akseliin katsotaan positiiviseksi, jos katsotaan Z-akselia kohti , voidaan nähdä, että projektio pyrkii pyörittämään tasoa minä Z-akselin ympäri vastakkaiseen suuntaan kuin myötäpäivään.
|
|
Voimamomentin ominaisuudet suhteessa akseliin 1) Voiman momentti suhteessa akseliin esitetään segmentillä, joka on piirretty Z-akselia pitkin pisteestä O positiiviseen suuntaan, jos > 0 ja negatiiviseen suuntaan, jos< 0. 2) Voiman momentin arvo akselin ympäri voidaan ilmaista kaksinkertaisella alueella Δ
3) Voiman momentti suhteessa akseliin on nolla kahdessa tapauksessa:
|

4. Voimapari. Voimaparin vektori ja algebrallinen momentti
Järjestelmää, jossa on kaksi samansuuruista, yhdensuuntaista ja vastakkaiseen suuntaan suunnattua voimaa ja kutsutaan pari voimaa.
Tasoa, jossa voimien ja toimintalinjat sijaitsevat, kutsutaan voimaparin toimintataso.
Lyhin etäisyys h parin muodostavien voimien vaikutuslinjojen välillä kutsutaan parin voiman olkapäällä.
Parin voiman hetki määräytyy parin yhden voiman ja olkapään moduulin tulolla.
|
|

Merkkien sääntö
Parin momenttivektori M on suunnattu kohtisuoraan voimaparin toimintatasoon nähden sellaiseen suuntaan, että tätä vektoria kohti katsottuna voimien parin pyrkiessä kiertämään toimintatasoa vastakkaiseen suuntaan myötäpäivään kiertoon.
- 4. Voimaparien ominaisuudet tasossa
Kiinteistö 1. hetken vektori M parien suuruus ja suunta on yhtä suuri kuin vektorin säteen vektoritulo AB tämän parin voimiin, jonka alkua kohti sädevektori on suunnattu AB, tuo on
![]() (1.7)
(1.7)
![]()
Kiinteistö 2. Parin muodostavien voimien päämomentti suhteessa mielivaltaiseen pisteeseen parin toimintatasolla ei riipu tämän pisteen sijainnista ja on yhtä suuri kuin tämän voimaparin momentti.
|
|

5. Voimaparien vastaavuuden ehdot
Lause voimaparien ekvivalenssista,
makaa samassa tasossa.
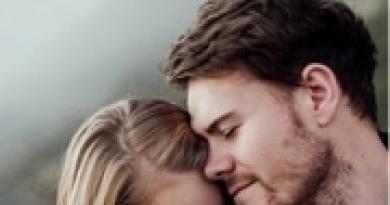
Kahden saman ja yhdensuuntaisen voiman järjestelmä, suunnattu vastapäätä juhlia ja ei makaa samalla suoralla, nimeltään pari voimaa. Esimerkki tällaisesta voimajärjestelmästä on voimat, jotka siirtyvät kuljettajan käsistä auton ohjauspyörään.
Voimaparilla on hyvin iso merkitys käytännössä. Siksi ominaisuuksia parit erityisinä toimenpiteet kappaleiden mekaanista vuorovaikutusta tutkitaan erikseen.
Summa parin vahvuus on sama nolla
P - P" = 0 (riisi. A ),
eli voimaparilla ei ole resultanttia. Tästä huolimatta keho on muutaman voiman vaikutuksen alaisena ei ole tasapainossa.
Parin voiman toiminta kiinteässä kehossa, kuten kokemus osoittaa, se on taipumus kiertää tämä on ruumis.
Voimaparin kyky tuottaa pyörimistä määrällisesti päättänyt pari hetkeä, yhtä suuri voiman ja lyhimmän etäisyyden tulo(otettu kohtisuorassa vahvuuteen) voimien toimintalinjojen välillä.
Tarkastellaanpa parin hetkeä M , ja lyhin etäisyys voimien välillä A , sitten hetken itseisarvo (kuva. A )
M = Ra = P"a .
Lyhin etäisyys voimien vaikutuslinjojen välillä kutsutaan olkapää pariskunnat, joten voimme sanoa sen hetki voimaparit ovat absoluuttisesti yhtä suuret pariskunnan yhden voiman ja sen olkapään tulos.
Vaikutus parin voiman toimintaa täysin sen määrää hetki. Siksi pari voimaa voidaan edustaa kaareva nuoli, osoittaa suunta kierto (katso kuva).

Koska voimaparilla ei ole resultanttia, se ei voida tasapainottaa pelkällä voimalla.
SISÄÄN Kansainvälinen yksikköjärjestelmä (SI) voima mitataan newtonit, ja olkapää sisään metriä. Vastaavasti hetki paria järjestelmässä SI mitattuna newtonometreissä (Nm) tai yksiköissä kerrannaisina newtonometri: kn m, Mn m jne.
Otamme huomioon muutaman voiman hetken positiivinen, jos parilla on taipumus kääntää kehoa myötäpäivään(riisi. A ) Ja negatiivinen, jos parilla on taipumus pyörittää vartaloa vastapäivään(riisi. b ).

Hyväksytty merkkisääntö hetkepareille ehdollisesti; voitaisiin hyväksyä vastapäätä sääntö. Kun ratkaiset ongelmia, sinun tulee aina ottaa sekaannusten välttämiseksi yksi erityinen merkkisääntö.
1. Pari voimaa- kahden voiman järjestelmä, joka kohdistuu kehoon kahdessa eri kohdassa:
Moduuliltaan yhtä suuri
Rinnakkainen
Päinvastaisesti ohjattu
2. Olkapääpari – lyhin etäisyys parin voimien vaikutuslinjojen välillä.
Parin voiman hetki
Parin voiman hetki- minkä tahansa voiman moduulin tulo parin olkapäästä (voimamoduuli x olake)
Voimaparin ominaisuudet
1. Projektioiden summa parin voimien mille tahansa akselille on nolla
F 2 cosα – F 1 cosα = 0
2. Parin voimien momenttien summa suhteessa mihin tahansa tason pisteeseen on yhtä suuri kuin parin momentti.
äiti o() = - F 1 d = - Fd
äiti o () = + F 2 l = + Fl
äiti o () + äiti o () = - Fd + Fl = - F(d-l) = - Fh
Siksi voimien paria ei voida korvata resultantilla.
Riippumaton Job opiskelija Tekijä: aihe 1.3. (1 tunnin – Kaikki )
1. Kokoa sanasto peruskäsitteistä aiheesta "Voimien pari" - arch, 'ezs - 1 tunti
1. Tehtävän ratkaiseminen voimien momenttien määrittämiseksi suhteessa pisteeseen: auto – 1 tunti
Aihe 1.4. Tasainen järjestelmä mielivaltaisesti sijoitetuista voimista
– (4 tuntia kaari, 2 tuntia auto, ezs)
Peruskonseptit
1. Tasainen voimajärjestelmä– voimajärjestelmä, jonka toimintalinjat ovat samassa tasossa.
2. Voimia voidaan käyttää koneessa:
A) satunnaisesti sijoitettu;
B) voimien parit;
B) yhteen pisteeseen lähentyvät voimat.
3. Tasainen järjestelmä mielivaltaisesti sijaitsevista voimista– kaikki voimat tai niiden toimintalinjat eivät leikkaa yhdessä pisteessä.
Tasovoimajärjestelmän tuominen tiettyyn keskustaan

1.Anna päällä kovaa keho toimii voimajärjestelmä
2. Haetaan pisteessä O 2 tasapainoista voimaa:
A) yksi on yhtä suuri ja yhdensuuntainen annetun kanssa:
B) toinen voima on sama kuin annettu, mutta vastakkaiseen suuntaan
3. Tämän seurauksena kehoon vaikuttavat:
A) lähentyvien voimien järjestelmä
B) voimaparien järjestelmä momenttien kanssa
4. Korvataan lähentyvien voimien järjestelmä tuloksena
Tai minkä mukaan jne.
5. Voimaparin toisen ominaisuuden mukaisesti löydämme kaikkien parien momenttien algebrallisen summan
M o = m 1 + m 2 + … + m n
Poinsot'n Lemma
1. Tämän seurauksena mielivaltainen litteä järjestelmä voimat voidaan vaihtaa:
- yhdellä voimalla, yhtä suuri kuin kaikkien mielivaltaisesti valittuun keskustaan kohdistettujen voimien geometrinen summa ja
- hetki, yhtä suuri kuin liittyvien parien momenttien algebrallinen summa
2. Hyväksytyt määritelmät:
A) piste o – pelkistyskeskus
B) päävektori– vektoriR yhtä suuri kuin kaikkien voimien geometrinen summa. Sen arvo ei riipu pelkistyskeskuksen valinnasta.
B) pääasia– momentti MO, yhtä suuri kuin parien momenttien algebrallinen summa. Sen arvo riippuu adduktiokeskuksen valinnasta (olkapään koko muuttuu).
Valun erityistapaukset
1.R 0 =0,M 0 ≠0 – järjestelmä on ekvivalentti pari voimaa hetkessä, yhtä suuri kuin järjestelmän päämomentti, joka tässä tapauksessa ei riipu pelkistyskeskuksen valinnasta;
2. R 0 ≠0,M 0 =0 – järjestelmä on ekvivalentti tuloksena R. Päävektori tässä tapauksessa on resultantti.
3. R 0 ≠0, M 0 ≠0 – järjestelmä on ekvivalentti tuloksena R, sovelletaan uuteen pelkistyskeskukseen, joka sijaitsee edellisestä etäisyydellä d = M o \R
4. R=0,M 0 =0 – tasovoimajärjestelmä on tasapainossa;
Varignonin lause (resultantin tasovoimajärjestelmän momentista)
Resultantin tasovoimajärjestelmän momentti mielivaltaiseen keskipisteeseen O nähden on yhtä suuri kuin järjestelmän kaikkien voimien momenttien algebrallinen summa suhteessa tähän keskustaan.
Analyyttiset tasapainoyhtälöt tasovoimajärjestelmälle
Tasapainotila ilmaistaan kolmella yhtälöllä - perustasapainoyhtälöt:
2. Vaihtoehdot tasapainoyhtälöiden kirjoittamiseen - riippuen voimien sijainnista
Kuorman luokitus
keskittynyt
Jaettu: linjaa pitkin, pinnan yli, tilavuuden yli
Taivutusmomentti
Palkkijärjestelmät
1. Objekti staattisten ongelmien ratkaisemiseen – palkit (tai palkkijärjestelmät)
2. Palkki - suoran palkin muotoinen osa, jossa on tuet kahdessa (tai useammassa) pisteessä.
Tukien tyypit
1. Nivellevä ja liikkuva: pyöriminen akselinsa ympäri (sarana) + translaatioliike (liikkuva)
2. Nivelletty-kiinteä: pyöriminen akselinsa ympäri (sarana)
3. Kova tiiviste(puristamalla): estää kaiken liikkeen.
Ongelmien ratkaiseminen tukireaktioiden määrittämiseksi
Tukireaktiot määritetään käyttämällä kolmea tasapainoyhtälöä (jos kytkentäreaktioiden määrä ei ylitä kolmea):
1. Näytä kuormat
2. Nimeä kuormat
3. Vapautetaan tuista ja korvataan niiden vaikutus palkkiin reaktioilla
4. Muodosta tasapainoyhtälö
5. Ratkaise tasapainoyhtälöt ja määritä niistä tukireaktiot
6. Liuoksen tarkistaminen
Voimien määrittäminen litteiden ristikoiden tangoissa - leikkaamalla pois solmut
1. Analyyttinen menetelmä
2. Graafinen menetelmä - Maxwell-Cremona-kaavion rakentaminen
Kitkateorian elementit
AIHE 1.5. KITKATEORIAN ALUKSET(automaattinen - 1 tunti)
Opiskelijan itsenäinen työskentely ( auto - 1 tunti)
1. Tehtävien ratkaiseminen yksittäisten tehtävien perusteella
1. Kitkan käsite
Kitkavoima syntyy, kun kappaleet joutuvat kosketuksiin ja estää yhden kappaleen liikkumisen toisen pinnalla.
2. Kitkavoimatyypit:
A) liukukitka
B) liukukitka
3. Liukukitka– vastus, joka ilmenee yhden kappaleen suhteellisessa liikkeessä toisen pinnan yli.

4. Kitkan lait:
A) Kitkavoima Ftr on suunnattu suhteellista liukunopeutta vastakkaiseen suuntaan
B) Kitkavoima ei riipu kosketuspintojen pinta-alasta
C) Kitkavoiman moduuli on verrannollinen normaalipaineeseen (mitä suurempi normaalipaine, sitä suurempi kitkavoima).
5. Kuvan mukaan:
A) painovoima mg – alas (mitä suurempi mg, sitä suurempi tukireaktio N (vektori)
B) kappale liikkuu alaspäin = kitkavoima suuntautuu kaltevaa tasoa ylöspäin
B) sileä pinta = tukireaktio N(vektori) on suunnattu kohtisuoraan tasoon nähden
D) aksiooman 3 avulla rakennamme suunnikkaan R diagonaalin (tulos)
6. Liukukitkavoimien tyypit:
A) kitkavoima levossa F tr f o N
B) kitkavoima liikkeen aikana F tr fN
N – normaali painevoima
f o – staattinen kitkakerroin
f – liukukitkakerroin – riippuu runkojen liukunopeudesta.
Molemmat kertoimet riippuvat pintojen materiaalista ja fysikaalisesta tilasta
7. Vierintäkitka- vastus, joka syntyy, kun yksi keho vierii toista kohti.

8. Liitäntöjen tyypit:
A) ihanteellinen (ei kitkaa)
B) todellinen (kitkalla)
Opiskelijoiden itsenäinen työskentely - 3 tuntia essee, 4 tuntia arch,
1. Ratkaise tehtäviä yksijänteisen palkin tukireaktioiden määrittämiseksi vaihtoehtojen avulla
2. Ratkaise tehtäviä ristikon tangoissa olevien voimien määrittämiseksi vaihtoehtojen mukaan
3. Vertaile menetelmiä panostuksen määrittämiseksi, tee lyhyt analyysi kunkin menetelmän eduista ja haitoista - esitä tulos taulukon muodossa
Automaattinen - 2 tuntia
1. Laskenta- ja graafisen työn suorittaminen palkkijärjestelmien kannatusreaktioiden määrittämiseksi
Voimapari (tai yksinkertaisesti pari) on kahden samansuuruisen, vastakkaisen suunnan ja kehon eri kohtiin kohdistuvan rinnakkaisen voiman yhdistelmä (kuva 30). Merkitsemme voimien paria symbolilla . Voimia kutsutaan parivoimaiksi; tasoa, jossa voimat sijaitsevat, kutsutaan parin toimintatasoksi.
Lyhin etäisyys parin voimien vaikutuslinjojen välillä on nimeltään parin olake (kuvassa 4 janan AB pituus h).
kolmekymmentä). Koska voimia voidaan siirtää niiden toimintalinjoja pitkin, kuvaamme seuraavassa parin voimia kohdistettuna parin käsivarren päihin.

Käytämme myös parille yksinkertaisempaa nimitystä muodossa, joka ei sisällä voimien kohdistamispisteiden nimityksiä.
Voimapari luonnehtii erityistä kappaleiden välistä vuorovaikutusta, jota ei voi ilmaista yhdellä voimalla. Siksi statiikassa tarkastellaan voimien ohella myös voimien pareja erityisominaisuuksineen, summaussääntöjä ja tasapainoehtoja.

Aluksi voimapari määritellään neljällä vektorilla (kuva 31.) - kahdella parin voimien vektorilla ja kahdella niiden vaikutuspisteiden sädevektorilla. Otetaan jokin piste avaruudessa momenttien O keskipisteeksi ja lasketaan parin voimien momentit suhteessa tähän keskustaan
Sitten edellinen väite voidaan ilmaista tässä muodossa: voimien pari voidaan määrittää parin voimien vektoreilla ja näiden voimien momentilla suhteessa mielivaltaiseen keskustaan O. Esitetään nyt kysymys: onko se mahdollista määritellä voimien pari eri tavalla, mieluiten pienemmällä määrällä määrittelyelementtejä?
Parin voimavektorien geometrinen summa on aina nolla, joten sitä ei voida käyttää parin karakterisoimiseen. Lasketaan parin voimien momenttien summa suhteessa pisteeseen O:
Saadussa tuloksessa on huomionarvoisia kaksi seikkaa.
1. Kun parin voimavektorien summa on aina nolla, parin voimien momenttien summa on nollasta poikkeava.
2. Parin voimien momenttien summa ei riipu momenttien keskipisteen valinnasta - pisteen O valinnasta riippuvat vektorit putosivat lopullisesta lausekkeesta vaaditun summan osalta.
Siten parin voimien momenttien summa osoittautuu riippuvaiseksi vain itse parin elementeistä - parin toimintatasosta, voimien moduulista ja parin olakkeesta. Tämä viittaa siihen, että tätä arvoa käytetään voimaparin ominaisuutena. Seuraavassa parin voimien momenttien summaa kutsutaan tämän parin momentiksi. Koska parin momentti ei riipu momenttien keskipisteen valinnasta, se on vapaa vektori - sitä voidaan soveltaa mihin tahansa kohtaan jäykässä kappaleessa, johon tämä voimien pari vaikuttaa.
Joten kysymykseen, onko mahdollista määrittää voimapari yksinkertaisemmin, saatiin myönteinen vastaus: voimien paria voidaan luonnehtia määrittämällä vain yksi vektori - parin hetki. Voimaparin momentti on vapaa vektori, joka on yhtä suuri kuin voimaparin momenttien geometrinen summa suhteessa mielivaltaisesti valittuun pisteeseen O avaruudessa
Tässä on huomattava, että yllä olevat pohdinnat ovat luonteeltaan melko vihjailevia eivätkä ole tiukka todiste juuri muotoillusta johtopäätöksestä. Statiikassa on kuitenkin useita lauseita, joissa tehty johtopäätös saa tiukan perustelun. Nämä lauseet löytyvät teoreettisen mekaniikan kokonaisista oppikirjoista.
Hyödyntämällä mielivaltaisuutta pisteen O valinnassa parin hetken määrittämisessä, voimme päästä yksinkertaisempaan menetelmään hetken laskemiseksi. Otetaan momenttien keskipisteeksi voiman kohdistamispiste -F (piste B kuvassa 31). Sitten voit kirjoittaa
Tässä huomioidaan, että koska voima -F kulkee pisteen B kautta. Jos momenttien keskipisteeksi otetaan piste A, jossa voima F kohdistetaan, niin voiman momentiksi F tulee nolla ja saadaan
Tämä johtaa toiseen sääntöön parin momentin laskemiseksi: voimaparin momentti on yhtä suuri kuin parin yhden voiman momentti suhteessa toisen voiman kohdistamispisteeseen.
Näin ollen parin momentin määrittäminen rajoittuu voimamomentin laskemiseen ja konstruoimiseen suhteessa pisteeseen, samalla tavalla kuin aiemmin käsiteltiin (katso sivu 12).
Tämän seurauksena tulemme seuraavaan johtopäätökseen: voimaparin momentti on vektori, joka on numeerisesti yhtä suuri kuin parin voimien moduulin tulo parin käsivarrella ja joka on suunnattu kohtisuoraan voimaparin toimintatasoon nähden. pari suuntaan, josta parin "pyörimisen" nähdään tapahtuvan vastapäivään (kierresääntö); Mikä tahansa kehon piste voidaan ottaa parin hetken sovelluspisteeksi.
Parin algebrallinen momentti on parin ja parin olkapään voimien moduulin tulo plusmerkillä, jos pari "kiertää" tasoaan vastapäivään, ja miinusmerkillä, jos päinvastoin.
Kuvassa Kuvassa 32 on esitetty voimapari, joka vaikuttaa säteen R omaavan kiekon tasossa, joka on asennettu kohtisuoraan pyörimisakseliin nähden. Parin varsi on yhtä suuri kuin kiekon halkaisija, parin momentin moduuli on yhtä kuin
![]()
Parin momentti on suunnattu kohtisuoraan levyn tasoon nähden ja sitä voidaan soveltaa mihin tahansa kohtaan levyllä.


Kuvassa Kuva 33 esittää samanlaista tapausta, mutta kuvattuna litteässä projektiossa. Tässä parin () voimat suunnataan kohtisuoraan piirustuksen tasoon nähden (merkki edustaa suunnattuja vektoreita, merkki edustaa poispäin lukijasta). Parin momentin moduuli on yhtä suuri kuin , on kohtisuorassa levyn tasoon nähden ja on piirustuksen tasossa (tarkemmin sanottuna se voidaan siirtää itsensä suuntaisesti piirustuksen tasoon).
Kuvassa on kaksi muuta esimerkkiä parin hetken rakentamisesta. 34. Kuvattujen parien momenttimoduuleilla on seuraavat arvot:
Parien momentivektoreilla on projektiot:

Voimaparin ominaisuudet
1. Voit muuttaa parin voimien suuruutta ja vipuvaikutusta jättäen momentin suuruuden ja parin voimien ”pyörimissuunnan” ennalleen.
2. Voimaparia voidaan liikuttaa halutulla tavalla sen toimintatasossa.

3. Voimaparia voidaan siirtää yhdensuuntaisesti itsensä kanssa missä tahansa tasossa, joka on poikkeuksetta yhteydessä runkoon, johon se kohdistuu.
Näissä ominaisuuksissa luetellut toimet eivät muuta parin momentin suuruutta tai suuntaa, ja ovat siksi parin vastaavia muunnoksia.
Yllä annetuissa esimerkeissä puhuttiin hetken rakentamisesta parin annettujen elementtien - toimintatason, voimien ja parin olkapää - perusteella. Voit myös esittää käänteisen ongelman - rakentaa voimien pari sen momentin perusteella. Olkoon tarpeen muodostaa voimapari sen momentin M perusteella (kuva 35, a). Tätä varten rakennetaan taso P, joka on kohtisuorassa hetken toimintalinjaan nähden (kuva 35, b). Tämä taso toimii parin toimintatasona. Tässä tasossa asetamme kaksi voimaa